

瑞萨高精度旋转变压器电机控制方案
发表时间: 2024-03-17 09:40:19 作者: 斯诺克比赛直播在线
,用来测量旋转物体的角位移和角速度。如下图所示,旋变由定子和转子组成,通常转子固定于
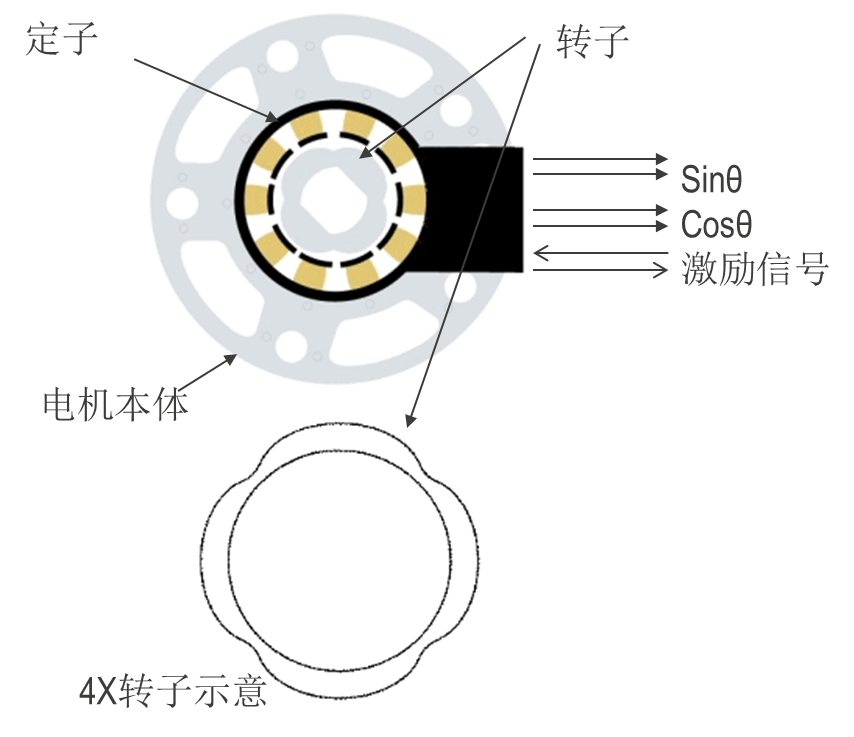
旋转变压器的工作原理和普通变压器基本相似。旋转变压器定子绕组作为变压器的原边,接受励磁电压。转子绕组作为变压器的副边,通过电耦合谐振磁耦合作用得到感应电压。
旋转变压器的原边、副边绕组则随转子的角位移发生相对位置的改变,从而输出绕组的电压幅值与转子转角成正弦、余弦函数关系。对输出信号进行模数转换,计算反正切值,即可得到转子当前的角位移,角位移对时间的微分即为转速。
瑞萨电子基于旋转变压器开发了高精度的电机控制解决方案,自主研发了全新的RDC(Resolver-to-Digital Conver旋转变压器到数字转换器IC,并结合RX系列微控制器MCU),推出了高精度的旋转变压器电机控制解决方案。该方案可广泛适用于工业和消费应用的电机控制系统。
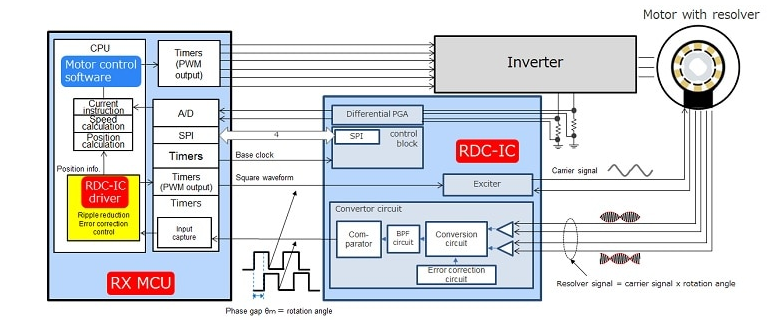
上图是方案的构成框图。在该方案中,RDC IC和RX MCU将来自旋转变压器的信号处理为角度信息,RX MCU同时还能控制电机运转。RX MCU上提供了RDC IC专用驱动程序,使用A就能轻松地执行旋转变压器处理。
首先,瑞萨RDC IC采用了新的相位差检测方式(Phase error detection method),通过计数RX-MCU上的相位差来得出位置信息。相位差数据由旋转变压器信号中的激励信号和旋转角度信息生成。相比于传统的相位跟踪检测方式(Phase tracking method),相位差检测方式能实现更高精度、更高速的电机实时控制。
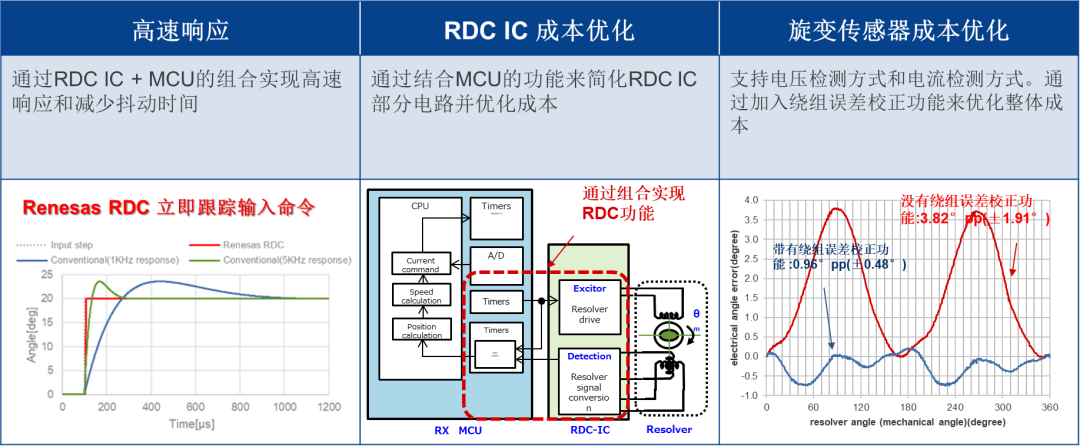
传统的采用PI控制伺服回路的相位跟踪检测方式包含频率特性,因此电机变速时会出现延迟时间。
⇒ 由于角度急剧变化,阶跃输入的伺服跟踪时间延迟增加。示例:1.5-8ms@180°阶跃。
⇒ 对于剧烈角度变化引起的阶跃输入,可以快速响应(10μs,20°阶跃输入)。
在旋转变压器传感器的配置上,该方案兼容电压检测型和电流检测型。旋转变压器必须是单相励磁两相输出型旋转变压器。不仅可以使用常见的电压检测型旋转变压器,还可使用低成本制造的电流检测型旋转变压器。
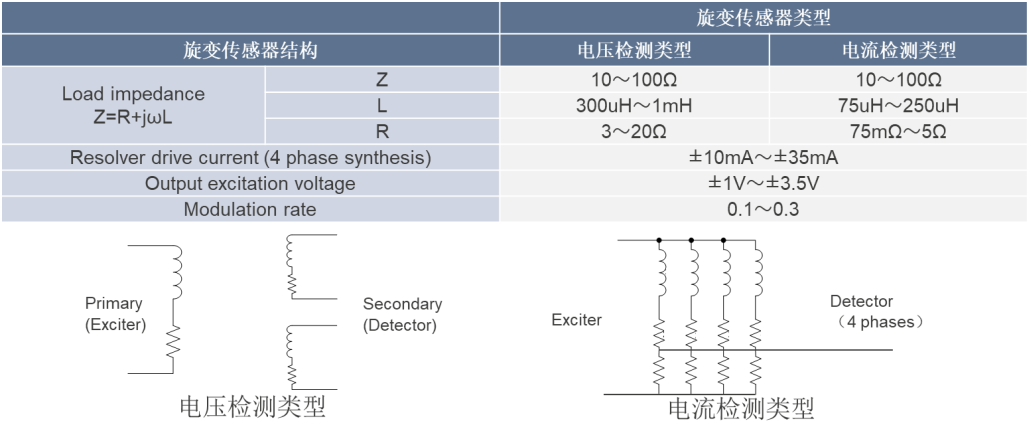
通过和多对极的旋转变压器配合,可以200,000 P/R机械角位置的高分辨率实现高位置精度。而且由于RX MCU可以计算电机原点位置,因此不需要电机原点位置的Z相输出。
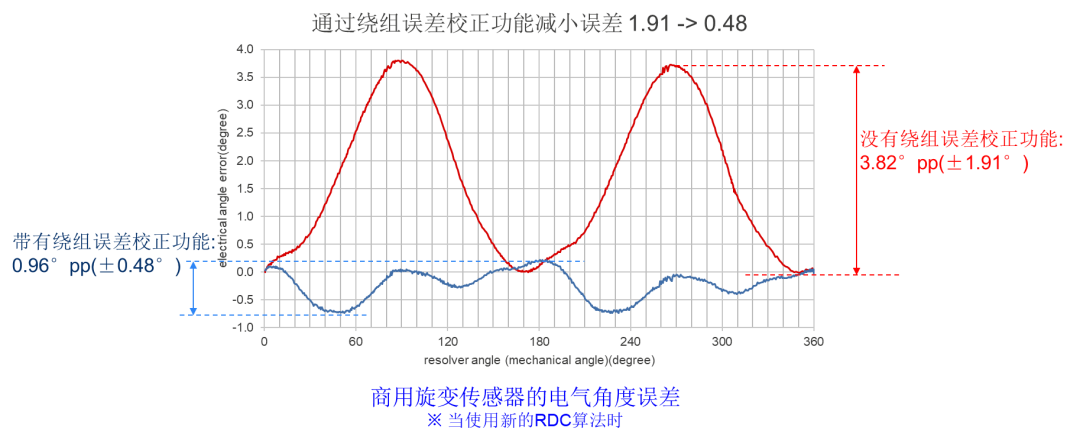
通过RDC IC组合RX MCU的方式,由MCU分担角度计算的部分功能,从而使得RDC IC的电路设计更加简化,降低RDC IC的器件成本。另一方面,通过加入特有的绕组误差校正功能,可以将常见旋转变压器的误差从1.91°减小到0.48°左右,从而可以选择更加低成本的旋转变压器。
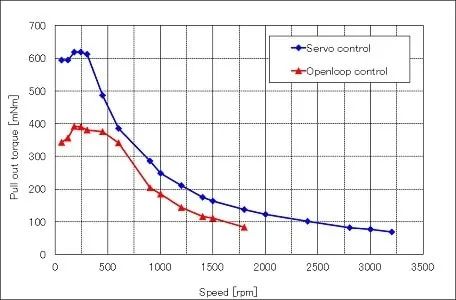
通过执行伺服控制,电机可实现扭矩最大化,并支持高速旋转。由于可简单地根据所需扭矩选择电机,而不考虑失步裕度,因此与开环控制方法相比,可缩小电机尺寸。
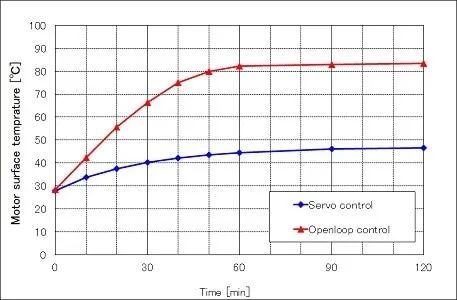
通过使用旋转变压器执行伺服控制,可以显著降低待机电流,并且只消耗负载所需的电流。此外,还可通过降低电流消耗来抑制电机的发热。
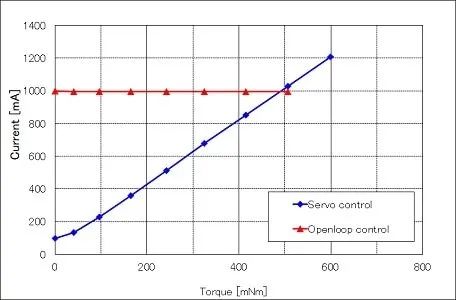
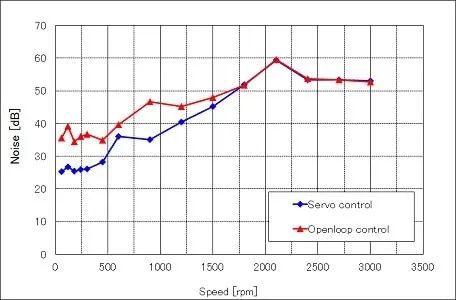
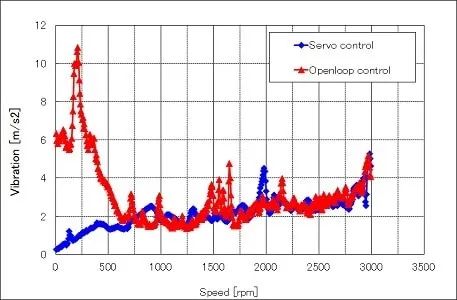
在开环控制过程中,由于电机在负载扭矩为500mNm或更大时失步,因此没有获得任何数据。
与开环控制相比,使用旋转变压器执行伺服控制可以显著抑制中低速范围的噪声和振动。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

十分相似。定子分布激磁绕组、正余弦反馈绕组,转子由硅钢片叠压而成,会随
和新能源汽车。通过阅读本文,您可以了解到:什么是旋变,它是如何工作的,旋变的相关应用和目前市场上存在哪些
的原边,接受励磁电压,励磁频率通常用400、3000及5000HZ等。转子绕...
,一对极,在解调时候,正弦余弦输出经过解调芯片,输出数字脉冲,按照360度对应2的n次方角度输出?还是有别的算法解调根号下A2+B2等于定值?
相移最高转速 贝米52.4-447万瓦100马10赫兹±3′≤10°40000 rrpm
相移最高转速BEM52.4-447VAc100mA10kHZ±3′≤10°40000RPM
),请问proteus中在哪里能找到啊,如果没有的话,用什么元器件可以代替啊,谢谢,不胜感激。{:23:}
。 一、伺服系统又称为随动系统,精确的跟随或者复现某个过程的反馈系统。使物体的位置、方位、状态等输出被控量能够跟随目标(设定)的任意
。一、伺服系统又称为随动系统,精确的跟随或者复现某个过程的反馈系统。使物体的位置、方位、状态等输出被控量能够跟随目标(设定)的任意变化
有3路信号接口,而要和它连接的带有模数转换功能的芯片有6路信号接口,那么它们应该怎么连接呢?为什么?!!希望各路大神能够指导,谢谢!
(rdc)au6802n1,设计了一套旋变解码的接口电路板。同时基于永磁
14XSZ3412-01的工作原理及引脚功能14XSZ3412-01的数据传输方法如何采用PC/104总线实现
作者:Ankur Verma,德州仪器应用工程师;Brian Rodriguez,德州仪器产品市场工程师
:机械角度90°,对应的电角度是360°。机械角度360°,对应的电角度是4*360°。
的无人搬运小车PROTUES仿真,导师要求设计实现小车走直线,在垂直路面的方向安装
的模块化系统的一部分。借助包含的软件,可以在各种配置下将 AMC1210 用于
的正余弦模拟量输入信号转换为类似增量编码器的输出信号A,B,Z 信号,转换后
/数字转换模块的工作原理和数据传输方法,探讨了其在寻北仪系统中与PC/104 总线的接口电路设计,
系统一般使用闭环分解器-数字转换器(RDCs)或开放环路的模数转换器(ADCs)得到
一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组
。它的转子绕组通过滑环和电刷直接引出,其特点是结构简单,体积小,但因电刷与滑环
的鉴相式工作方式中,感应信号VB和激磁信号VK之间的相位差θ角,可通过专用的鉴相器线路检测出来并表示成相应的电压信号,设为U(θ),通
/数字转换模块接口电路,该电路已经成功应用在某平台惯导三个姿态角的测量中,测角速度快,
日本美蓓亚(Minebea)将从事并研究驱动纯电动汽车(EV)和混合动力车(HEV)的同步马达用
中常用的绕组型式有两种,即双层短距分布绕组和同心式正弦分布绕组。双层短距分布绕组也能达到较高的绕组
并具有良好的工艺性,但是在绕组中还存在一定的谐波磁动势分量,这些谐波磁动势分量
系统一般使用闭环分解器数字转换器 (RDCs) 或开放环路的模数转换器 (ADCs) 得到
性能,因此被广泛用在EV、HEV、EPS、变频器、伺服、铁路、高铁、航空航天,以及其他需要获取位置和速度信息的应用。
其一、二次侧绕组分别放在定、转子上,一次侧绕组与二次侧绕组之间的电磁耦合程度与转子的转角密切相关。
感测器的励磁放大器和模拟前端,在尺寸大小仅为1平方英寸的印刷电路板(PCB)上实施分立式元件和标准运算放大器。
或同步分解器,它是一种电磁式传感器,汽修行业里的人常常称它为“旋变”。
做在一个磁路上,装在一个机壳内,构成“粗测”和“精测”电气变速双通道检测装置,用于
中,定、转子上都有绕组。转子绕组的电信号,通过滑动接触,由转子上的滑环和定子上的电刷引进或引出。由于有刷结构的存在
的转子和定子角位置不同,输出信号能轻松实现对输入正弦载波信号的相位变换和幅值调制,最终由专用的信号处理电路或者某些具备一定功能接口的DSP和单片机,根据输出信号的幅值和相位与正弦载波信号的关系,解析出转子和定子间的角位置关系。
(resover)包含三个绕组,即一个转子绕组和两个定子绕组。转子绕组随马达
,定子绕组位置固定且两个定子互为90度角(如图1所示)。这样,绕组形成了一个具有角度依赖系数的
。利用移位寄存器和加法器实现解码算法,并且采用流水线技术,具有算法速度快和
性能,因此被广泛用在EV、HEV、EPS、变频器、伺服、铁路、高铁、航空航天,以及别的需要获取位置和速度信息的应用。 在上面
方法所造成的扭矩失步、裕度不足、电量消耗和发热量大,噪音和振动难以消除等问题。瑞萨电子携手美蓓亚三美推出了一款基于
(简称旋变)是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正、余弦函数关系,这种
。传感器线圈(励磁、正弦、余弦三组线圈)固定在壳体上,信号线圈固定在转子上。
- 上一个: 技能强基 立异为要 企业产能再打破
- 下一个: 全球电网升级改造背景下变压器行业高景气可期



